Блок «ДВС» представляет собой настраиваемый двигатель
внутреннего сгорания, который подходит для моделирования
двигателей с принудительным зажиганием (spark-ignition)
и с самовоспламенением (diesel). Управление блоком
доступно либо крутящим моментом, либо физическим
сигналом дроссельной заслонки. Блок включает в себя
дополнительные динамические параметры такие как инерция
коленчатого вала и задержку времени отклика.
Также данный блок имеет регулятор скорости,
предотвращающий заглох двигателя и улучшающий переходные
характеристики.
Блок производит вычисления по следующим уравнениям:
Удельная частота вращения двигателя:
\[
\omega_{N}(\omega) = \frac{\omega}{\omega_{PP}},
\]
где \( \omega \) — текущая скорость;
\( \bar{\omega} \) — скорость при максимальной мощности.
Мощность двигателя представлена третьим полиномом:
\[
P(\omega(\omega_N)) = P_p \cdot p_N(\omega_N);
\]
\[
p_N(\omega_N) = s_1 \cdot \omega_N + s_2 \cdot \omega_N^2 + s_3 \cdot \omega_N^3,
\]
где \( s_i \) — коэффициенты полинома;
\( P_p \) — максимальная мощность.
Блок вычисляет крутящий момент двигателя при полностью
открытой дроссельной заслонке, используя полиномиальные
коэффициенты согласно:
\[
M(\omega(\omega_N)) = p_1 + p_2 \omega_N + p_3 \omega_N^2;
\]
\[
p_1 = \frac{s_1 P_p}{\omega_{PP}}; \quad p_2 = \frac{s_2 P_p}{\omega_{PP}}; \quad p_3 = \frac{s_3 P_p}{\omega_{PP}}
\]
Блок устанавливает удельную частоту вращения двигателя при
максимальной мощности согласно:
\[
\omega_{NPP} = \omega_N(\omega_{NPP}) = 1.
\]
Подставляя данного равенства в формулу для \(p_N\) дает
\[
s_1 + s_2 + s_3 = 1
\]
Данное условие нормирует мощность в соответствии с частотой вращения двигателя на максимальной мощности. Блок приравнивает наклон \( p_N(\omega_{PP}) \) нулю, таким образом, что
\[
s_1 + 2s_2 + 3s_3 = 0.
\]
Блок определяет удельную частоту вращения двигателя при
максимальном крутящем моменте как
\[
\omega_{NPT} = \omega_N(\omega_{PT}) = \frac{\omega_{PT}}{\omega_{PP}} < 1.
\]
Где скорость максимальной мощности больше скорости
максимального крутящего момента. Блок использует
полиномиальную интерпретацию, чтобы найти безразмерный
удельный крутящий момент \( m_N \) и установить наклон равным нулю таким образом, что
\[
\frac{dm_N(\omega_{NPT})}{d\omega} = s_2 + 2s_3 \omega_{NPT} = 0.
\]
Данное выражение позволяет найти \(s_i\)
\[
s_1 = \frac{3 - 4\omega_{NPT}}{2(1 - \omega_{NPT})}; \quad s_2 = -\frac{\omega_{NPT}}{2(1 - \omega_{NPT})}; \quad s_3 = -\frac{1}{2(\omega_{NPT} - 1)}
\]
Вычисление момента ДВС производится по формуле:
\[
M(\omega(\omega_N)) = \frac{2M_P}{3 - \omega_{NPT}}(s_1 + s_2 \omega_N + s_3 \omega_N^2),
\]
где \(M_P\) — максимальная мощность.
Замена \(\omega_{NPT}\) приводит уравнение момент \(M(\omega(\omega_N))\) в вид:
\( 2M_p \omega_{PP}^2 - 3P_p \omega_{PP} + P_p \omega_{PT} = 0 \)
Блок ДВС, используя переменные \( M_p \), \( P_p \) и \( \omega_{PT} \), вычисляет максимальные обороты \( \omega_{PP} \) по формуле
\( \omega_{PP} = \frac{3P_p + \sqrt{P_p(9P_p - 8M_p \omega_{PT})}}{4M_p} > \omega_{PT} \).
Блок вычисляет полиномы согласно коэффициентам типа двигателя. При включении тумблера "Дизельный двигатель", блок определяет \( s_i \) согласно значениям приведенной ниже таблицы:
| Коэффициент мощности |
Тип двигателя |
| Принудительное зажигание |
Самовоспламенение (дизель) |
| \( p_1 \) |
1 |
0,6256 |
| \( p_2 \) |
1 |
1,6948 |
| \( p_3 \) |
1 |
-1.3474 |
Таблица №1. Коэффициенты мощности по типу двигателя
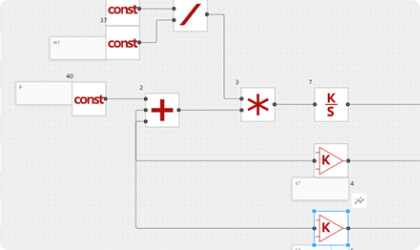
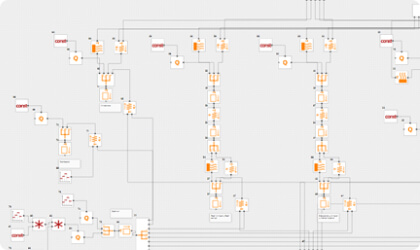
Данная модель состоит из следующих основных элементов:
- ДВС;
- Шасси с трансмиссией;
- Динамика 4-х колесного автомобиля;
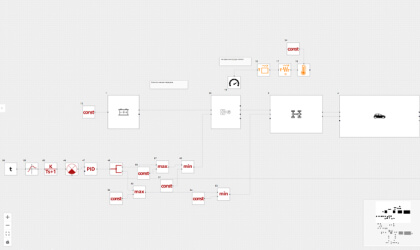
- Коробка передач (рисунок 2).
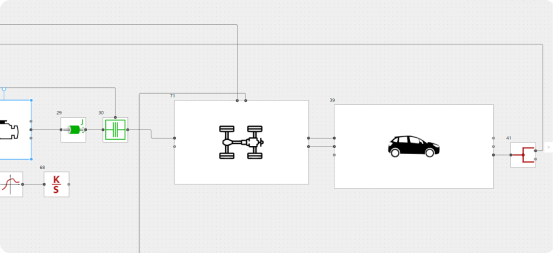
Рис. 1 – Схема подключения блока “ДВС”

Рис. 2 – Схема коробки передач
Динамика продольного движения описывается с помощью блоков “
Динамика 4-х колесного автомобиля” и “Шасси с трансмиссией”.
Расчет скорости движения автомобиля производится через его
ускорение, определяемое из уравнения второго закона Ньютона
для нахождения результирующей силы, приводящей автомобиль в
движение. Уравнение имеет следующий вид:
\[
m \cdot a = F_T + F_R + F_D + F_W.
\]
В данной формуле \( m \) — масса автомобиля в кг, \( a \) — ускорение, сообщаемое автомобилю в м/с2,
\( F_T \) — сила сухого трения между шинами и поверхностью дороги, равная:
\[
F_T = F_{T, f} + F_{T, r},
\]
где \( F_{T,f} \) — сила трения между передними шинами и дорогой, равная:
\( F_{T,f} = \frac{\eta \cdot N_{fd} \cdot N_m}{r_t} \cdot T + B \cdot U_b \)
где \( \eta \) — КПД в о.е.;
\( N_{fd} \) — передаточное число главной передачи;
\( N_m \) — число электродвигателей;
\( r_t \) — радиус колеса в м;
\( B \) — коэффициент усиления торможения;
\( U_b \) — относительное положение педали торможения;
\( F_{T,r} \) — сила трения между задними шинами и дорогой, равная:
\( F_{T,r} = B \cdot U_b \).
\( F_{T,f} \) — сила трения между задними шинами и дорогой, равная:
\( F_{T,r} = B \cdot U_b \)
\( F_{R} \) — сила сопротивления движению шин, равна:
\( F_{R,i} = C_R \cdot F_{N,i} \).
\( C_R \) — коэффициент качения, \( F_{N,f} \) — сила, действующая либо на переднюю, либо на заднюю ось трансмиссии и равна:
\( L_{101} \cdot F_{N,f} = m \cdot g \cdot \cos \theta \cdot CG_{r} - m \cdot a \cdot CG_{h} - m \cdot g \cdot \sin \theta \cdot CG_{h} \)
\( L_{101} \cdot F_{N,r} = m \cdot g \cdot \cos \theta \cdot CG_{f} + m \cdot a \cdot CG_{h} + m \cdot g \cdot \sin \theta \cdot CG_{h} \)
где \( L_{101} \) — длина колесной базы в м;
\( F_{N,f}, F_{N,r} \) — силы, действующие на переднюю и заднюю оси трансмиссии автомобиля соответственно (в Н);
\( CG_{h} \) — высота центра масс в м;
\( CG_{f}, CG_{r} \) — расстояние от задней и передней оси до центра масс в м;
\( F_D \) — сила аэродинамического сопротивления, равная:
\( F_D = \frac{1}{2} \cdot \rho \cdot A \cdot C_D \cdot V^2 \)
где \( \rho \) — плотность воздуха в кг/м 3;
\( A \) — фронтальная площадь автомобиля в м2;
\( C_D \) — коэффициент аэродинамического сопротивления;
\( V \) — продольная скорость автомобиля в м/с
\( F_W \) — сила тяжести, равная:
\( F_W = m \cdot g \cdot \sin \theta \),
\( g \) — ускорение свободного падения в м/c 2,
\( \theta \) — угол наклона дороги в градусах
Показать